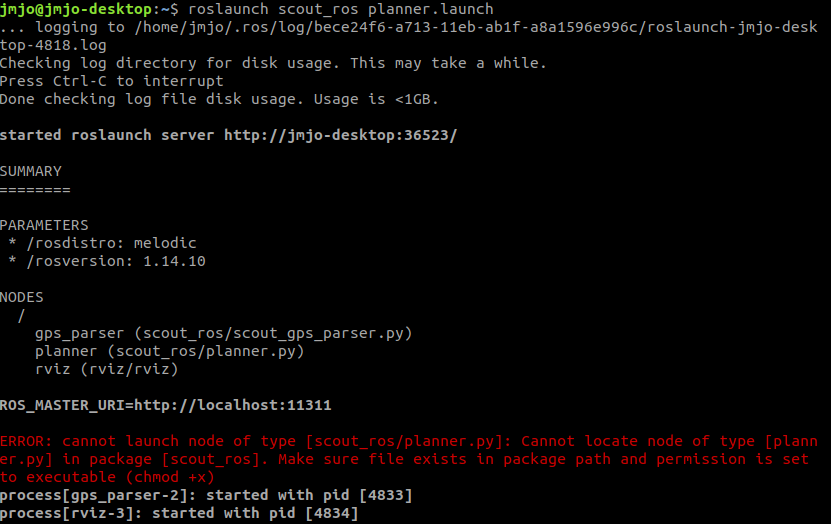
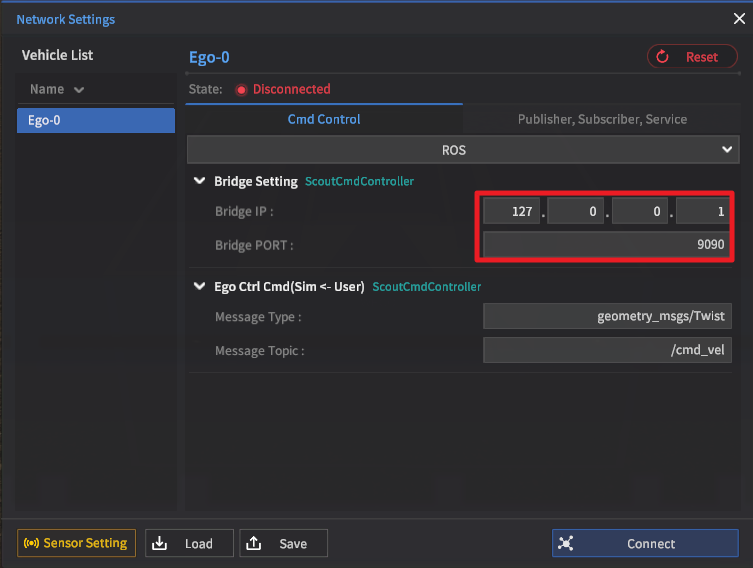
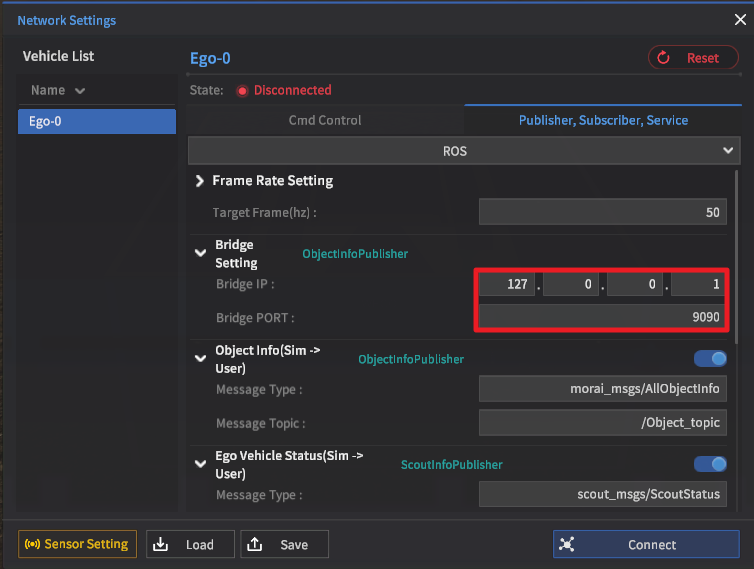
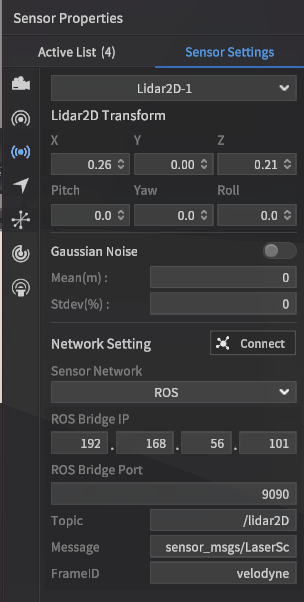
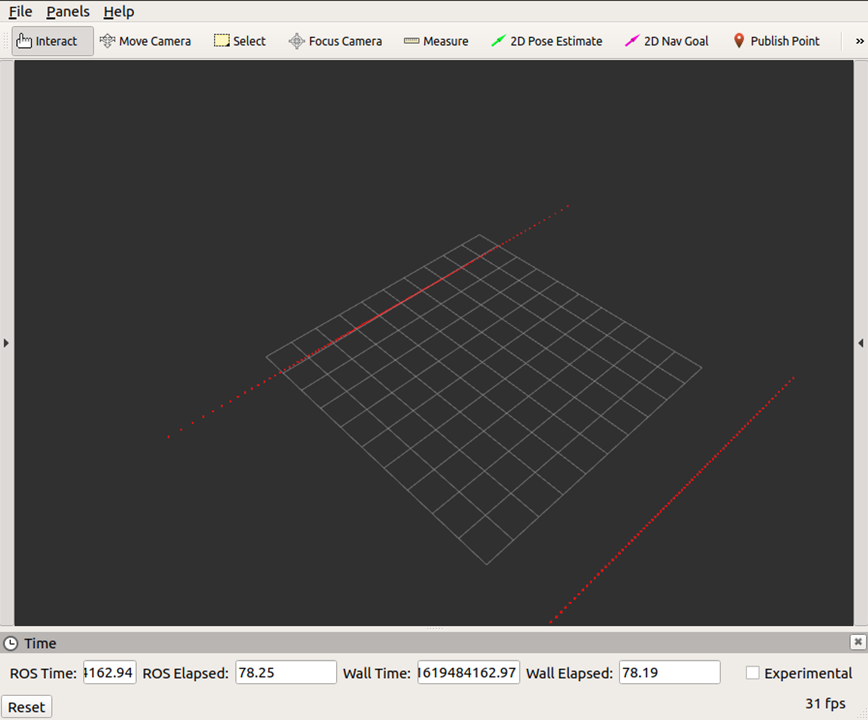
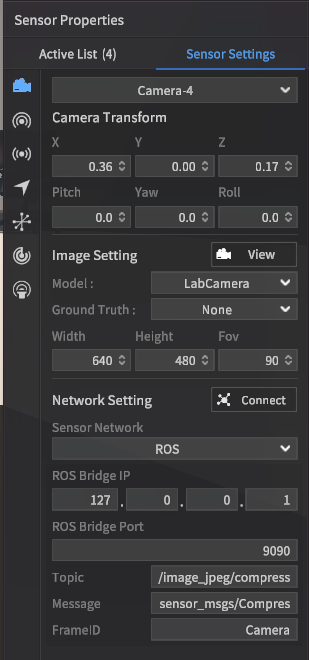
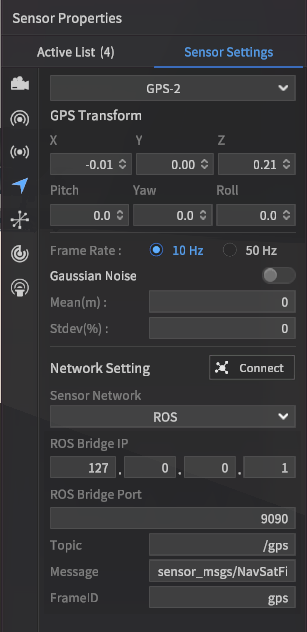
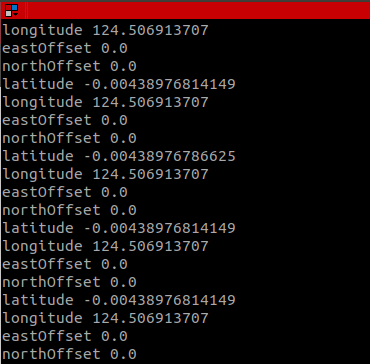
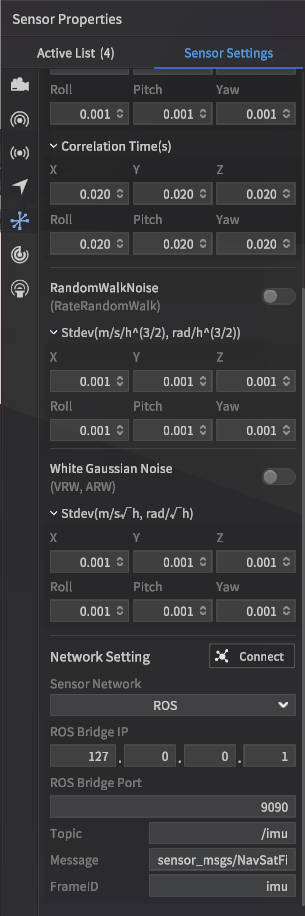
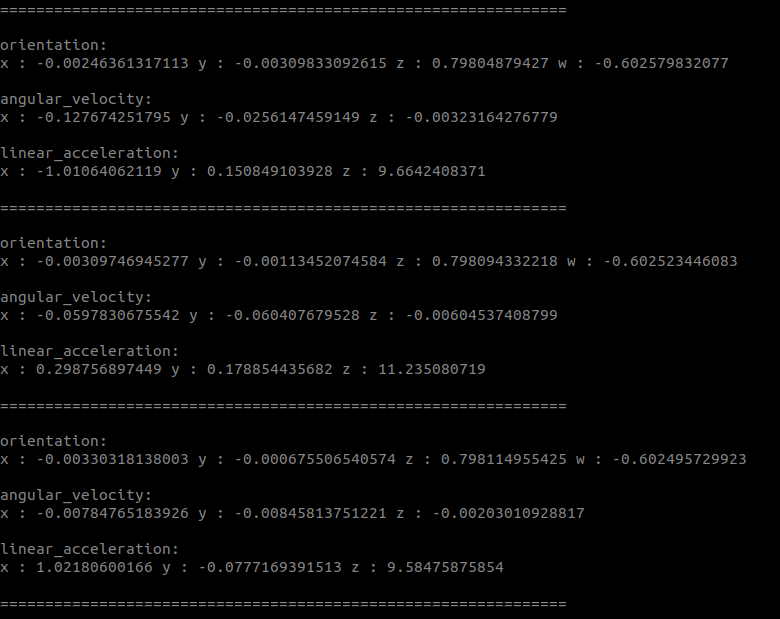
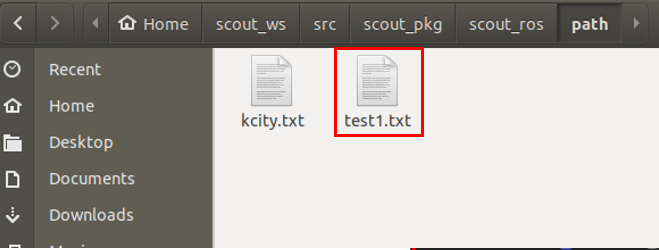
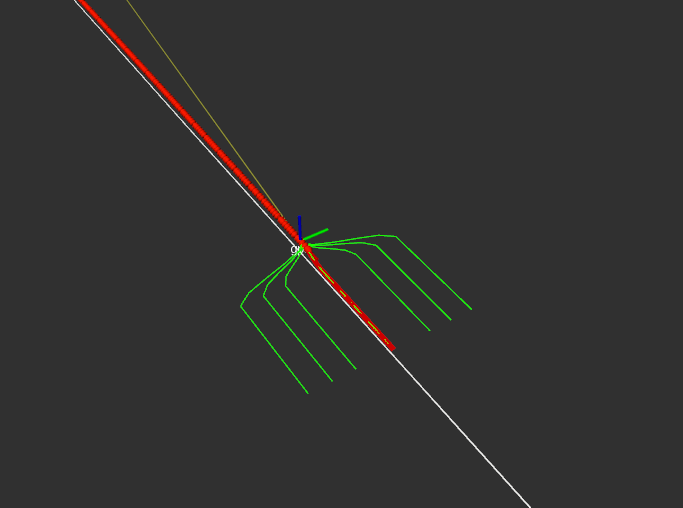
MORAI SIM WeGo User Manual (v4.6) 예제 코드 안내 Scout 예제 코드 안내 Current: 예제 코드 실행 방법 (Scout-Mini Sim) 예제 코드 실행 방법 (Scout-Mini Sim) 파일 권한 부여파일 실행 시 아래와 같은 오류가 발생 할 수 있다.roscd scout_ros/scriptschmod +x *.py시뮬레이터 네트워크 세팅시뮬레이터 네트워크 세팅네트워크 세팅 모든 예제 코드는 rosbridge 를 실행 후 진행 한다.rosbridge 실행 : roslaunch rosbridge_server rosbridge_websocket.launch Bridge IP 는 rosbridge를 실행 하고 있는 IP를 입력한다. Local 환경 : 127.0.0.1Virtual 환경 : 가상환경 설치할때 세팅했던 IP센서 코드 테스트라이다 시뮬레이터 센서 세팅은 아래와 같이 한다.Bridge IP 는 rosbridge를 실행 하고 있는 IP를 입력한다. Local 환경 : 127.0.0.1Virtual 환경 : 가상환경 설치할때 세팅했던 IProslaunch scout_ros lidar.launch 카메라시뮬레이터 센서 세팅은 아래와 같이 한다.Bridge IP 는 rosbridge를 실행 하고 있는 IP를 입력한다. Local 환경 : 127.0.0.1Virtual 환경 : 가상환경 설치할때 세팅했던 IProsrun scout_ros camera.py GPS시뮬레이터 센서 세팅은 아래와 같이 한다.Bridge IP 는 rosbridge를 실행 하고 있는 IP를 입력한다. Local 환경 : 127.0.0.1Virtual 환경 : 가상환경 설치할때 세팅했던 IProsrun scout_ros gps.py IMU시뮬레이터 센서 세팅은 아래와 같이 한다.Bridge IP 는 rosbridge를 실행 하고 있는 IP를 입력한다. Local 환경 : 127.0.0.1Virtual 환경 : 가상환경 설치할때 세팅했던 IProsrun wecar_ros imu.py 주행 경로 제작주행 코드 테스트roscd scout_ros/launch && gedit path_maker.launchlaunch 파일을 열어서 경로파일를 생성할 폴더 및 이름을 변경 할 수 있다.arg “ (경로가 생성되는 폴더 이름) (생성할 경로의 파일 이름)”roslaunch scout_ros path_maker.launch원하는 경로를 주행 후 launch 파일을 종료하면 파일이 완성된걸 확인 가능하다.roscd scout_ros/path 주행 코드 테스트주행 코드 테스트launch 파일을 열어서 추종할 경로파일의 이름을 변경 할 수 있다.roscd scout_ros/launch/ && gedit planner.launchroslaunch scout_ros planner.launchauto mode로 변경(키보드 Q 모드변경)생성한 경로를 따라 주행하는 것을 확인 할 수 있다. ×