장애물 배치 및 시나리오 관리
기본 조작

Scenario에서 장애물을 생성, 배치, 삭제를 할 수 있다.
장애물 배치
Vehicle
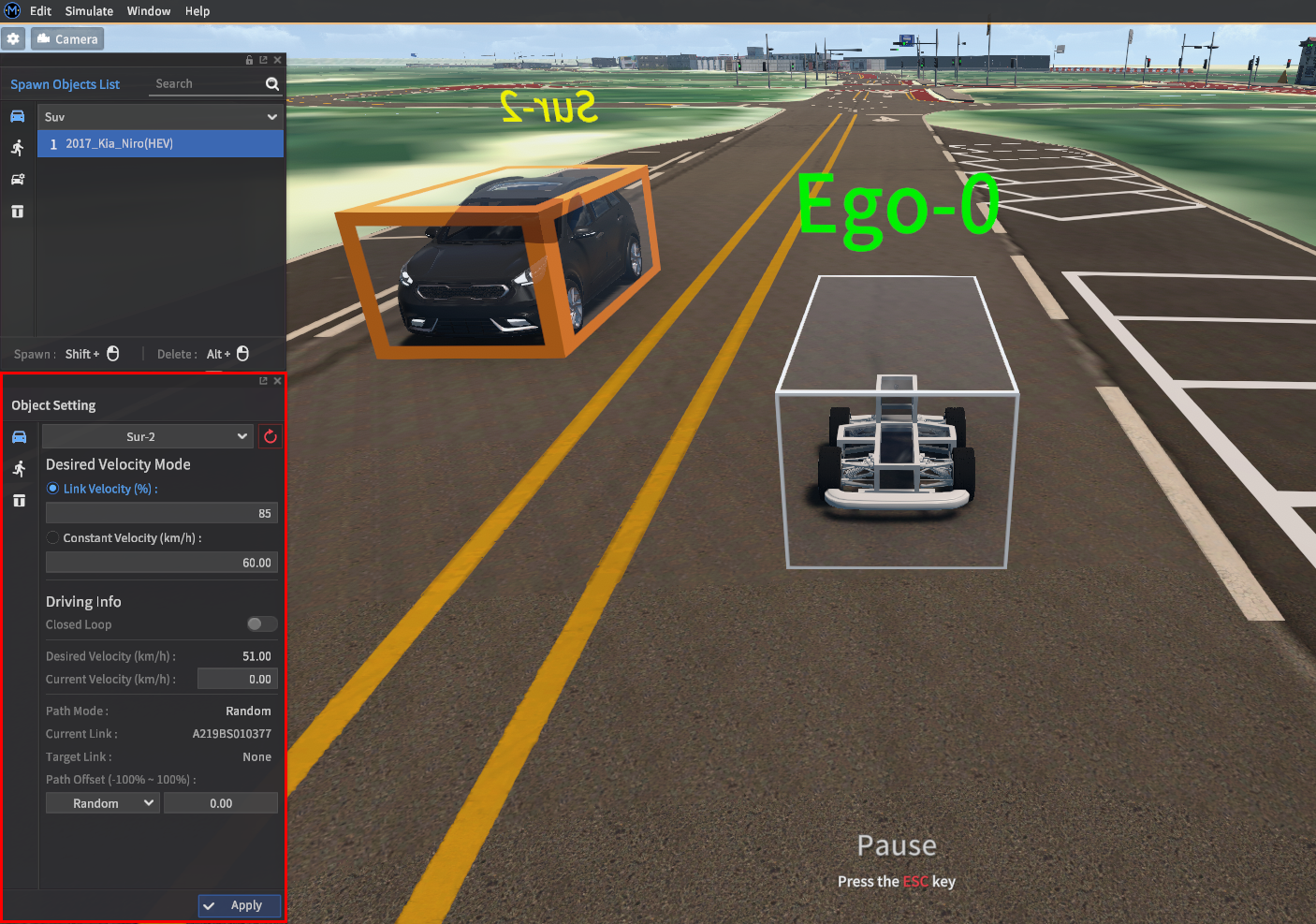
원하는 차량를 선택한다.
Shift를 누르면 preview 차량가 나오고, 원하는 위치에 Shift + 왼쪽 클릭으로 생성한다. 삭제는 삭제할 보행자에 마우스를 올린 후 Ctrl + 왼쪽 클릭하여 삭제한다.
차량의 현재 속도 및 목표 속도 수정가능
Desired Velocity(km/h) : 차량의 목표 속도
Current Velocity(km/h) : 차량의 현재 속도
Pedestrian
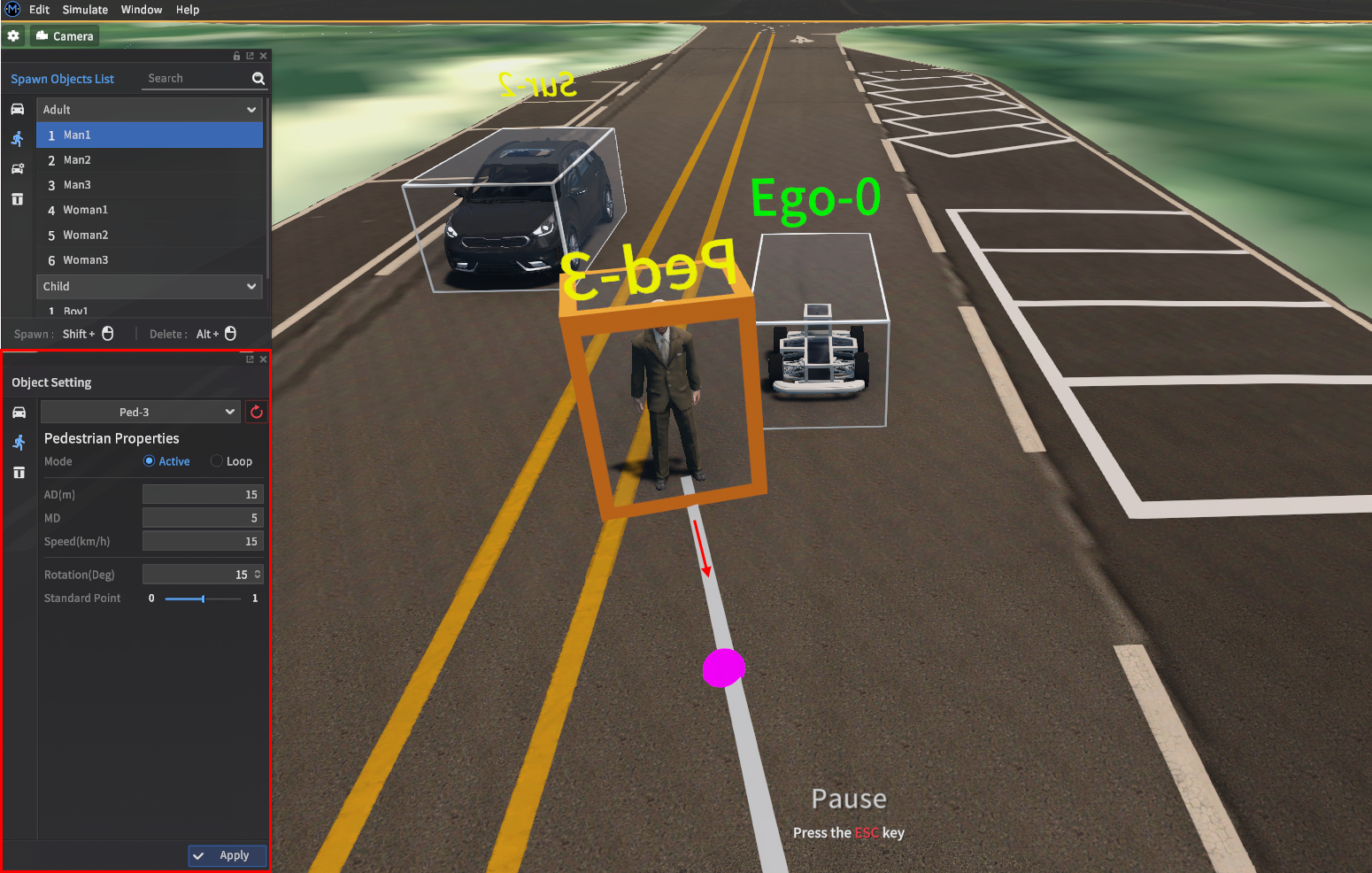
원하는 보행자를 선택한다.
Shift를 누르면 preview 보행자가 나오고, 원하는 위치에 Shift + 왼쪽 클릭으로 생성한다. 삭제는 삭제할 보행자에 마우스를 올린 후 Ctrl + 왼쪽 클릭하여 삭제한다.
보행자가 길을 건너는 알고리즘에 대한 파라미터 수정 가능
AD(Active Distance) : 차량과 Standard Point 사이의 거리가 AD 범위 안에 들어오면 보행자 알고리즘을 진행한다.
MD(Max Distance) : 보행자 알고리즘이 진행될 때 보행자가 이동할 수 있는 최대 이동 거리
Speed : 보행자 이동 속도
Active : 알고리즘 진행 여부
Loop : 알고리즘 반복 여부
Rotation : 보행자의 방향 전환
Standard Point : AD 거리, 차량과 보행자 사이 거리를 결정하는 기준점
Obstacle
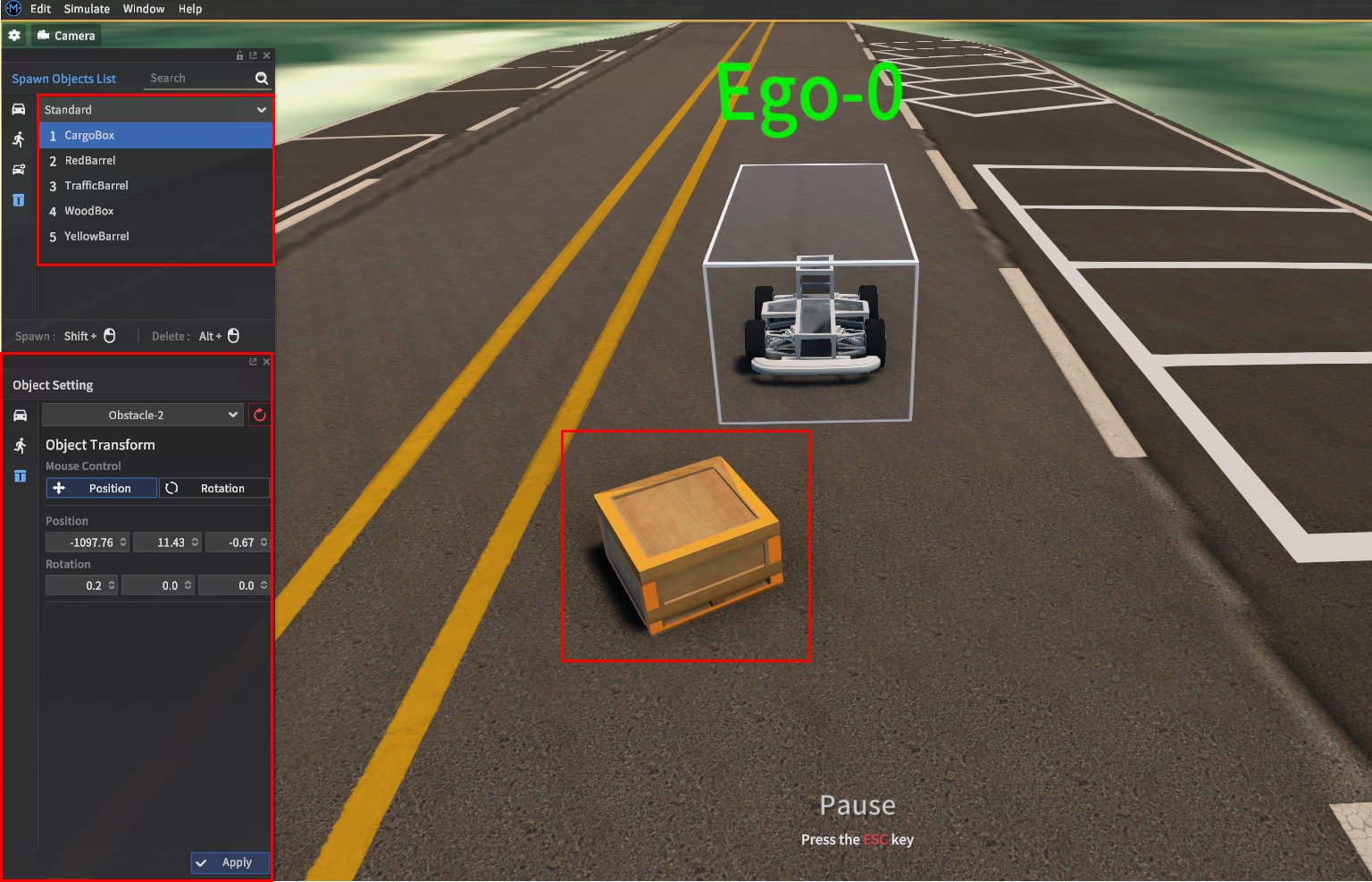
원하는 장애물 종류를 선택
Shift + 왼쪽 클릭으로 생성하고 삭제는 Alt + 왼쪽 클릭
장애물의 위치, 각도 값 수정 가능
POS XYZ : 현재 위치
ROT XYZ : 현재 각도
Shaded Area (음영 구간) 배치

Edit - Scenario - Map Edit mode 선택함.

ShadedArea 선택함.
Shift + 왼쪽 클릭으로 생성함. Alt + 왼쪽 클릭으로 삭제함.
Shaded Area의 Size, Position, Rotation 항목 수정 가능함
Size, Position, Rotation을 선택 후 드래그 앤 드롭 으로 Shaded Area 크기 조절/위치 이동/회전 가능함.
POS XYZ : 이동하고 싶은 축(X,Y,Z) 선택. 값 입력하거나 클릭·드래그 앤 드롭하여 Position 수정
e.g : x 10 만큼 이동
ROT PYR : 수정하고 싶은 축(P,Y,R) 선택. 값 입력하거나 클릭·드래그 앤 드롭하여 Rotation 수정
e.g : pitch 45도 회전
Size XYZ : 크기 수정하고 싶은 축(Size X,Y,Z) 선택. 값 입력하거나 클릭·드래그 앤 드롭하여 Size 수정
e.g : Size X 2.0m로 크기 변경
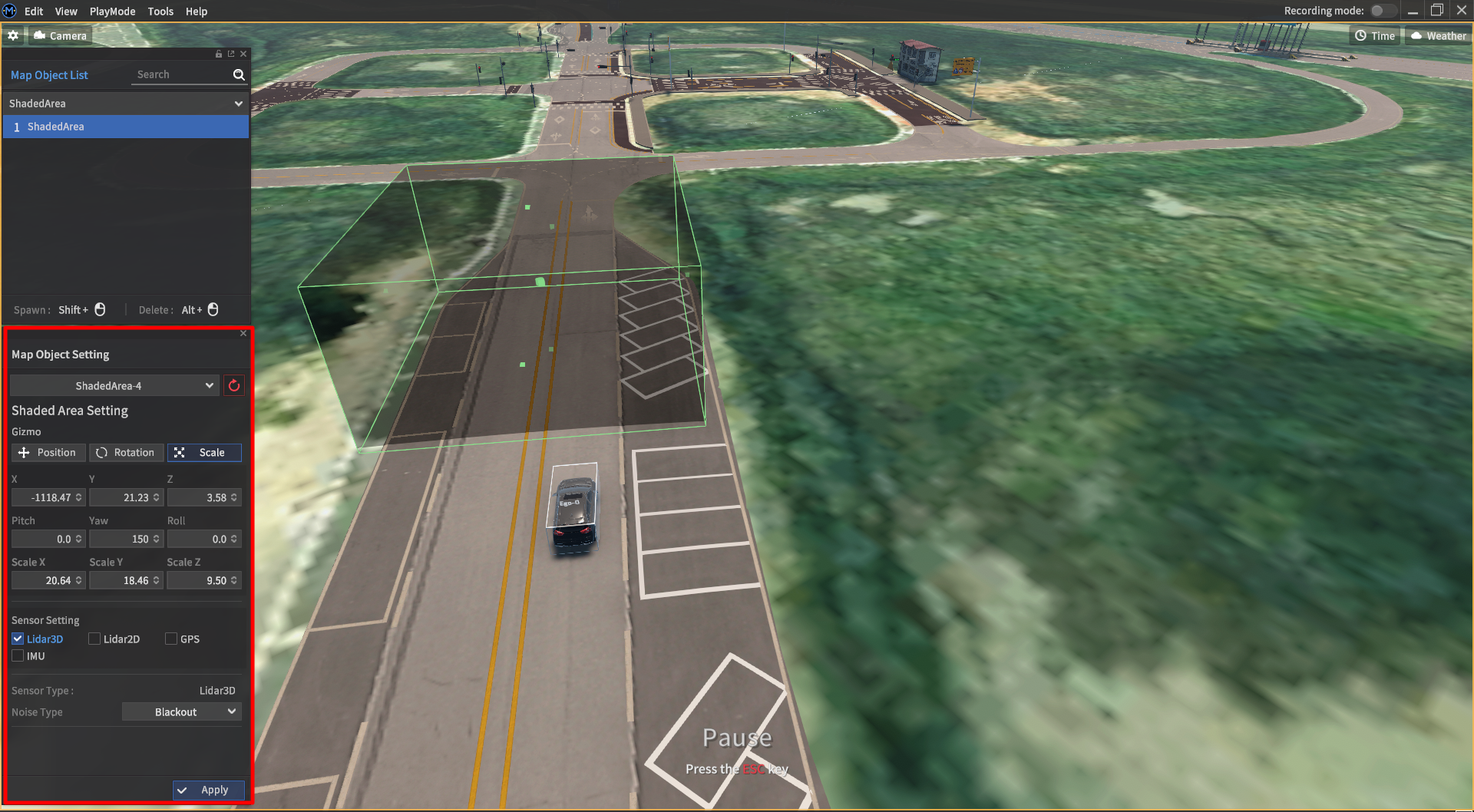
Sensor Setting에서 각 센서 토글을 클릭해서 세팅 가능.
GPS
Noise Type 내 Blackout 설정 시, Latitude, Longitude, Altitude 값 0으로 출력됨.
Noise Type 내 Noise 선택 후 Gaussian Noise내 파라미터에 따라 GPS 출력 값 변동됨.
IMU
Noise Type 내 Blackout 설정 시, Orientation , Angular Velocity, Linear Acceleration 값 0으로 출력됨.
Noise Type 내 Noise 선택 후 Gaussian Noise 내, Bias-Instability Noise , Random Walk Noise 내 파라미터에 따라 IMU 출력 값 변동됨.
Lidar
Noise Type 내 Blackout 설정 시, Point Cloud 값이 빈 값으로 출력됨.
Noise Type 내 Noise 선택 후 Gaussian Noise내 파라미터에 따라 Lidar 출력 값 변동됨.
시나리오 관리
Save&Load

현재 자신의 차량, 차량, 보행자, 장애물의 정보들을 저장하고 로드할 수 있다.
Delete
현재 맵에 있는 모든 차량, 보행자, 장애물을 일괄적으로 삭제할 수 있다.