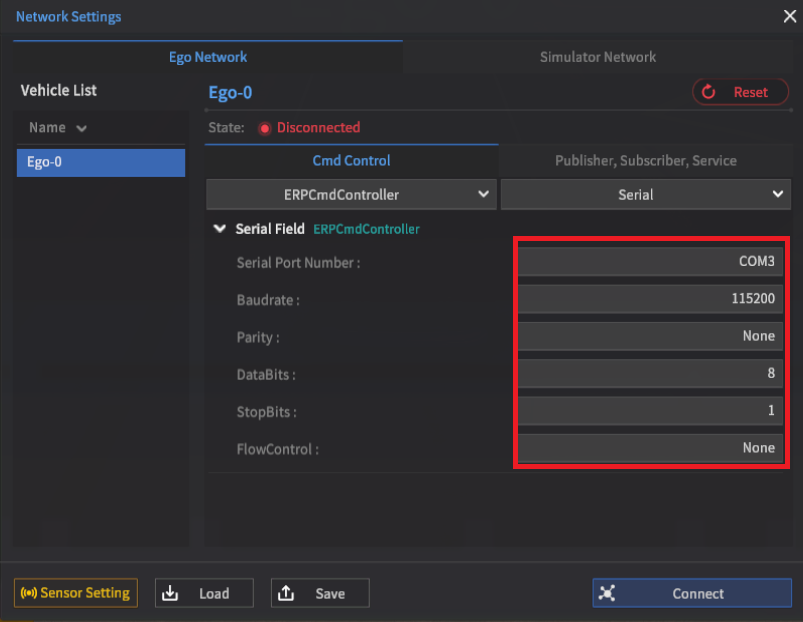
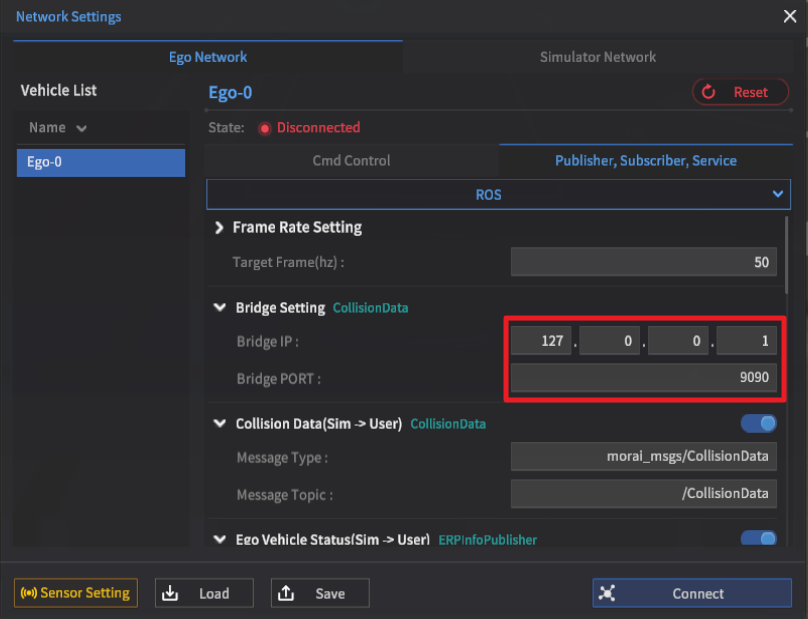
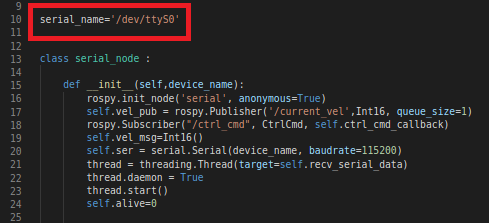
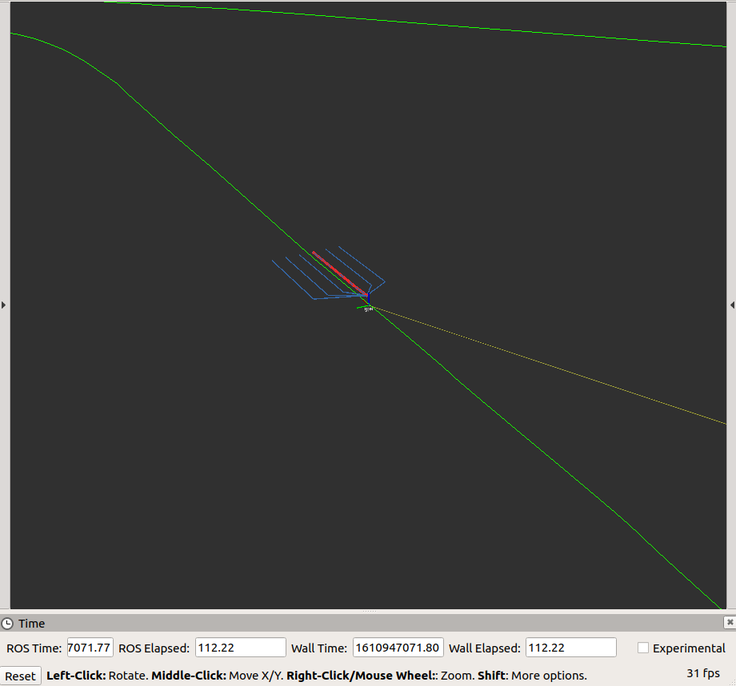
MORAI SIM WeGo User Manual (v4.6) 예제 코드 안내 EPR42 예제 코드 안내 ROS, ROS+Serial Current: ROS+Serial 사용 예제 ROS+Serial 사용 예제 시뮬레이터 네트워크 세팅네트워크 세팅 위에서 생성한 Serial port인 COM1을 아래와 같이 입력해준다Bridge IP를 아래와 같이 세팅 (가상환경 설치할때 세팅했던 IPv4)실제 케이블 연결확인 ls/dev/ttyUSB* (USB 연결 순서에 따라 포트 번호가 바뀐다)port 권한 부여 : $sudo chmod 777 /dev/ttyS0(실제 케이블 연결시 $sudo chmod 777 /dev/ttyUSB0 $sudo chmod 777 /dev/ttyUSB1)활성화되어있는 Serial port 확인 dmesg | grep tty주행 코드 테스트주행 코드 테스트erp_ros/scripts/lib/serial_node.py 아래와 같이 본인 환경에 맞게 컴포트 번호를 변경한다 (serial_name = '/dev/ttys0)erp_ros/scripts/lib/serial_node.py 10 Line수정 serial_name = ‘/dev/ttyS0’(실제 케이블 연결시 serial_name =‘/dev/ttyUSB0’ or ‘/dev/ttyUSB1’)roslaunch rosbridge_server rosbridge_websocket.launchroslaunch erp_ros erp42_serial_planner.launchauto mode로 변경(키보드 ‘q’ 모드변경)정해진 경로를 따라 주행 ×