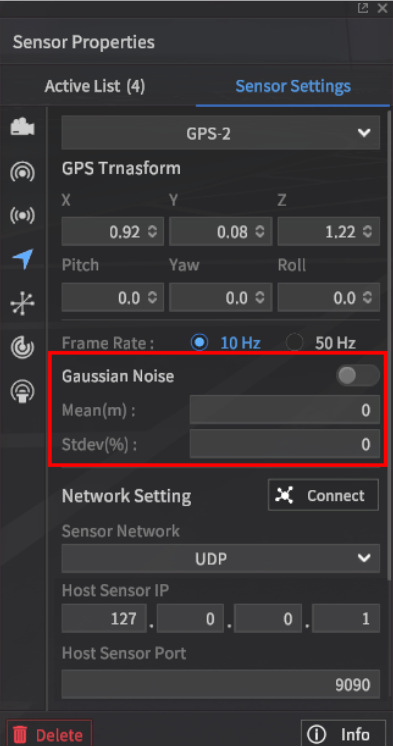
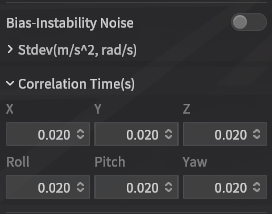
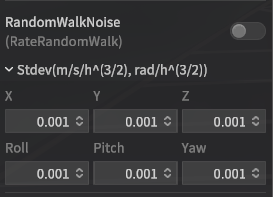
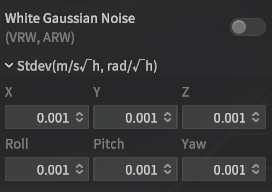
MORAI SIM WeGo User Manual (v4.6) 센서 설정 Current: Sensor Noise 생성 기능 사용 방법 Sensor Noise 생성 기능 사용 방법 Sensor Noise 생성 기능 사용 방법GPS NoiseGPS 는 Gaussian Noise를 적용 시킬 수 있다.Gaussian Noise 옆 체크박스를 체크하여 Noise를 생성 할 수 있다Noise의 정도는 아래 Mean(m), Stdev(%)에 값을 입력하여 조절 가능하다. Lidar NoiseLidar 는 Gaussian Noise를 적용 시킬 수 있다.Gaussian Noise 옆 체크박스를 체크하여 Noise를 생성 할 수 있다Noise의 정도는 아래 Mean(m), Stdev(%)에 값을 입력하여 조절 가능하다. IMU Noise FilterIMU 는 Bias-instability, Random Walk, White Gaussian Noise를 적용 시킬 수 있다.각 Noise Model 좌측에 있는 체크박스를 체크하여 Noise를 생성 할 수 있다각 Noise의 조절 은 다음과 같다.Bias-instability Noise : - Stdev(m/2^2, rad/s) , Correlation Time Random Walk Noise : - Stdev(m/s^2√Hz, rad/s√Hz) White Gaussian Noise : - Stdev(m/s^2)*√Hz, (rad/s)*√Hz) ×